HDD-Exploring and Navigating Through the Terrastellar Cosmos
In the very recent past in a galaxy far, far away (actually M87 a mere 55 million light years away), the first images of a black hole were reportedly made deep in space. Pretty impressive stuff but a bit closer to home is the reality that horizontal directional drilling (HDD) activity is often akin to entering a blackhole rather than characterizing it!
Picture the drill bit traveling through the underground and the utilities as space objects along the journey and it is easy to see how these concepts are not that far apart.
RELATED: Subsurface Utility Engineering Benefits Trenchless Installation
Humans have been observing and mapping the cosmos for a million years or so and it is incredible to think that when an HDD crew directs their bit into the ground to its eventual destination, we often know less about what is along the terrastellar (term invented here) corridor in many cases then an interstellar journey to Mars and back! This is particularly the case in congested utility corridors in older downtown areas and military and industrial complexes.
Evidence supports the lack of quality information underground and for all contractors, HDD included, it is a major liability. According to the Common Ground Alliance Damage Information Reporting Tool (DIRT) 2017 Report contractors are involved in the majority of utility damage reports (61 percent) which is not a surprise since contractor are the ones performing the excavation or boring. The root cause is defined generally as “Excavation Practices Not Sufficient” to describe the 142,980 incidents reported. This root cause is substantially higher than reasons such as lack of one-call participation and poor locates. The majority of reports involve Telecommunications and Natural Gas Service/Drops and Distribution.
The DIRT reports can only publish what is captured or detected. In HDD operations, a real problem is latent cross bores. These are borings, particularly gas, that have unwittingly pierced an existing and active sewer line.
According to a report published by the National Conference of State Legislatures in 2018 (Cross-Bore Prevention, Anne Kolesnikoff, November 2018) there are more than 800,000 miles of public sewer lines and 500,000 miles of laterals. The report cites that there are potentially hundreds of thousands of latent cross bores or 0.4 per mile in the United States alone. These cross bores eventually lead to blockages in the sewer line and a common practice to dislodge the blockage is with an auger. The potential for catastrophic damage is clear and the results often manifest themselves on the nightly news broadcast.
HDD operations suggest that minimum separation for a pilot hole from existing known utilities should be in the range of 10 ft. This may not be practical in all situations but the critical information to obtain these margins of safety are only as good as the 3D spatial information of the utilities.

Fortunately, there is hope on the horizon, and that is the advancement of 3D information regarding the underground utility corridors. The above ground world is increasingly incorporating the use of LiDAR and photogrammetry to accurately map and produce a virtual as-built. It is only logical that the next big leap for mankind (sorry another space reference) is to produce 3D virtual as-builts of the underground infrastructure. In fact, the ASCE 38-02 Standard Guideline for the Collection and Depiction of Existing Subsurface Utility Data is currently undergoing an update to implement a 3D standard. This update is scheduled for release in 2020.
RELATED: Benefits of Using Subsurface Utility Engineering for HDD Projects
There is no doubt the underground is a much more challenging environment for the detection of all underground assets with remote sensing e.g., EM and GPR tools than the above ground. This simple fact is due to the complexities of the ground affecting transmitted GPR waves or receiving EM induced or passive signal inputs vs that of a laser reflection in air over a reasonably short distance of a relatively simple medium such as air. As well insitu tools affixed to the drill head are just not there yet in terms of detecting all possible conflicts during actual boring. Major advancements are now available in terms of GPR technology and its place in the overall workflow with all other sensor information.
Increasingly, the use of dense GPR arrays are helping to refine the underground 3D imaging process just as LiDAR and 3D photogrammetry are above ground. In the recent past array technology was very expensive and moved very slowly over the street corridor in the project area. It seemed daunting to demonstrate the overall value of these systems and they were not universally accepted as a standard utility mapping tool. Today an array can move at posted speed limits increasing production of data collection and as well mitigating any need for traffic control or chase vehicles and temporary road closures. This factor is a major game changer in terms of value. Moreover, it is simply impossible to collect and process the volume and quality of data from any 2D GPR system when compared to a 3D array. A key takeaway when GPR array data is processed is that it yields the highest quality depth information of the detected utility relative to other geophysical methods. This is due to the robust imaging algorithms necessary to produce the 3D images of the utilities.
GPR array data, just as that obtained from 2D GPR, is not a stand-alone solution regardless of the accuracy of depth information an array can yield, as some utilities are not resolvable with GPR particularly in soils not ideal for the GPR. However, even in marginal soils the trench expressions of deeper utilities as well as imaging of vaults and other underground obstacles is remarkable. Firms that have embraced the latest generation high speed GPR array systems understand this and have developed workflows that incorporate all information from QLD through QLB into a final CAD deliverable pre QLA. These workflows incorporate all historical data, geophysical data, and visual cues.
RELATED: Proper HDD Design Is Key to Successful Completion
For HDD operations, verification of the horizontal and vertical orientation of the utilities in the path of the bore can only be determined as an absolute by exposing the utility or vacuum excavation. The key is minimizing this activity to reduce overall project costs and as well test holes become conduits for drilling fluids further adding costs and complications on the project. Having detailed 3D information can be used as the basis for “clash detection” a household term in the structural engineering world; in the utility space we call this a conflict. Regardless of the nomenclature, 3D information is invaluable in terms of developing a test hole strategy for the entire corridor to minimize “dry holes” and get the absolute survey grade horizontal and vertical information at the critical crossings.
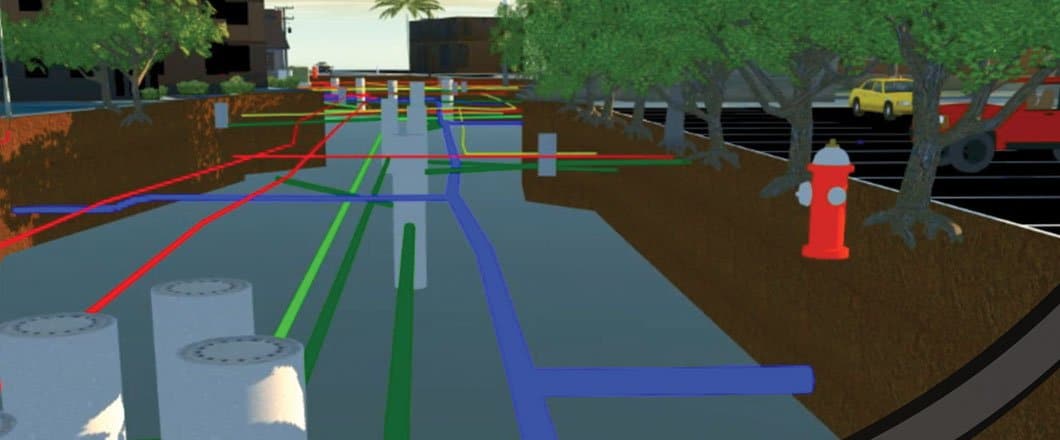
The day is coming soon when preprocessed 3D information incorporating all sensor and test hole data will be rendered in augmented reality images on the boring machine graphical user interface as the drill head advances into the terrastellar utility cosmos. This has the potential to be an incredible tool as offsets can be tracked in real time visually of the existing utility systems as the bit advances. Examples of these images are becoming more common in publications and online for the SUE industry as it is rapidly evolving into a 3D solution.
By merging these data into a VR interface just maybe performing a boring through a congested utility corridor in the very near future will be less of an encounter into a black hole and more like a journey through mapped constellations.
Matthew J. Wolf is president of ImpulseRadar Inc.



